Project Video
Video Description: Skip to 12:40 to see the roll-and-pitch controller demonstration, showcasing the robot's ability to climb uneven terrain and perform blind stair descent.
Project Gallery
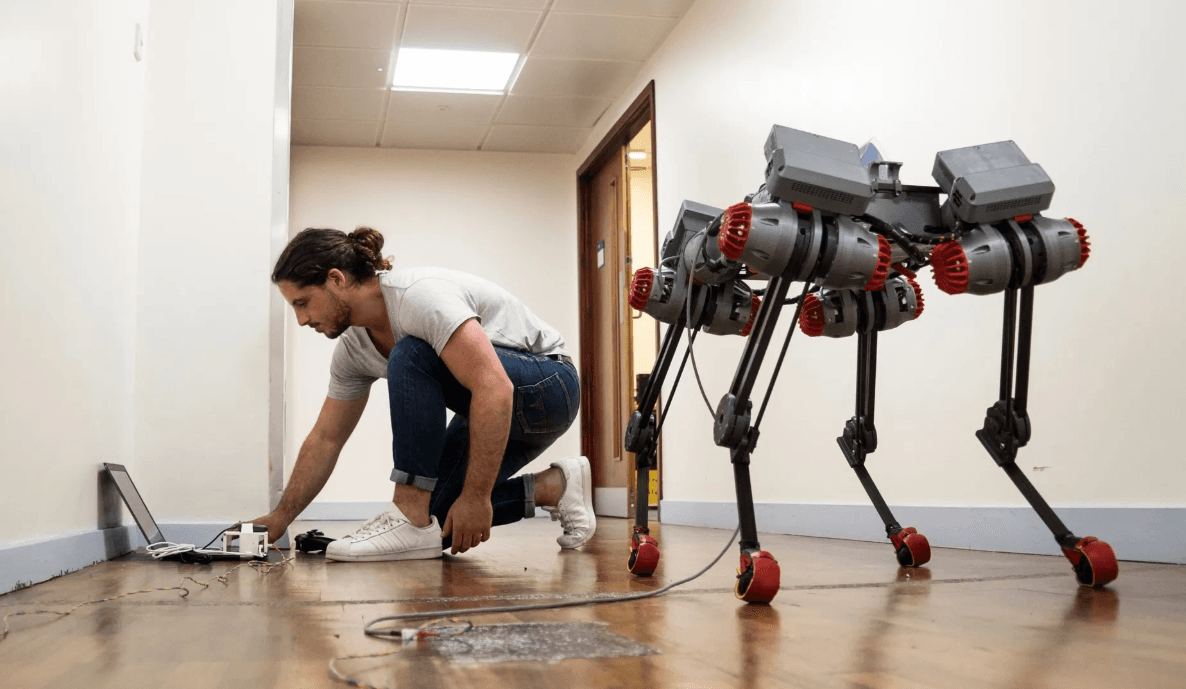
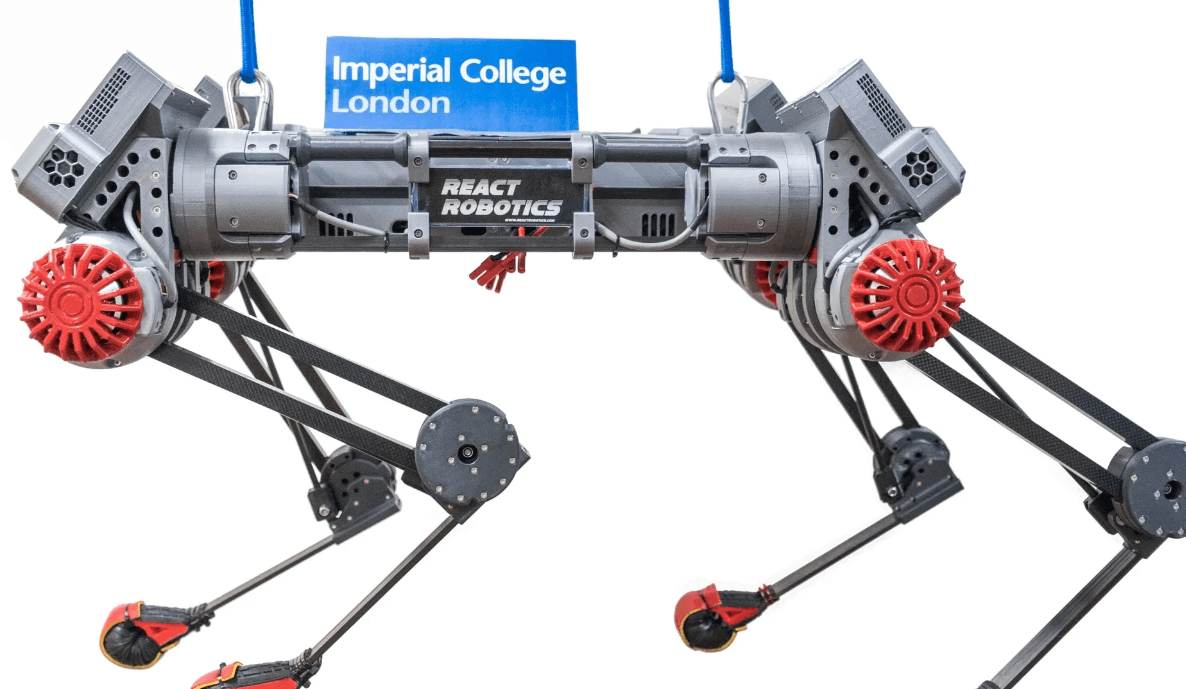

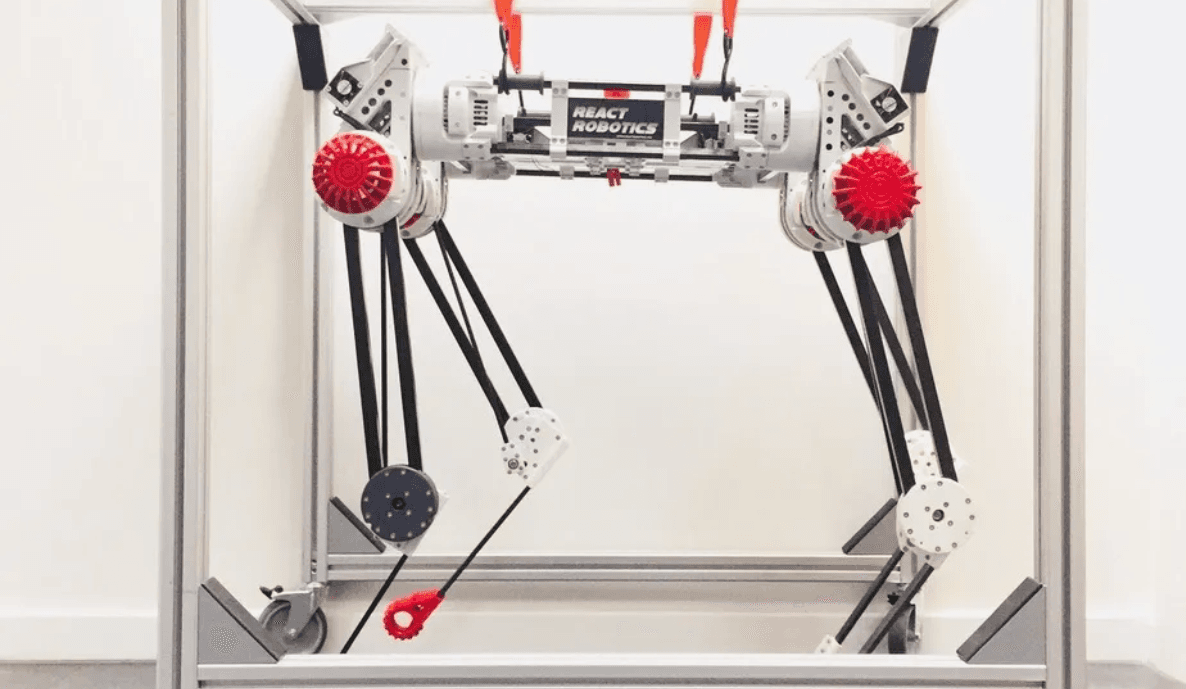
My MSc Robotics dissertation at Imperial College London. After building DogBot, React AI—a London-based startup—approached Imperial's Robot Intelligence Lab looking for someone to write a controller for it. That someone turned out to be me.
At the time, I knew next to nothing about legged robot control. I rolled up my sleeves and got to work. Intimidated by what seemed like incredibly complex mathematical approaches in the literature (nonlinear model predictive control), I decided to take a first-principles approach instead.
Step by step, I designed a periodic gait controller, then gradually layered in more sophisticated control strategies. I eventually converged on using a PID controller per hip joint for stability. It was super fun. The robot could walk over rough terrain, balance, and reject disturbances—but because it wasn't explicitly controlling its interaction with the environment, it didn't perform that well in practice and tended to slip.
The robot itself was nothing more than okay, but my understanding of how to control these systems became solid—grounded in first-principles, bottom-up thinking. Shortly after, I was hired by Ocado Technology's 10x to lead their (then secret) legged robotics mission. There, we built entire legged robots from scratch—capable of backflips and more.
Understanding and implementing model predictive control from first principles ended up being one of the most satisfying mental achievements of my life. What a time.
Video Description: Skip to 12:40 to see the roll-and-pitch controller demonstration, showcasing the robot's ability to climb uneven terrain and perform blind stair descent.